
四域融合中央超算
“四叶草”用一套中央超算实现座舱域、动力域、车身域和智能驾驶域的融合,超算平台内植入整车控制、车身控制、网关管理、热管理、仪表信息系统、车载娱乐系统、360°环视、APA泊车、疲劳监测、生命监测、行车记录、哨兵模式、声音警报、DSP功放、视频会议共15项模块,相当于一套盒子集成了原来的15个盒子。

这套中央超算平台就相当于左右脑,右脑SoC主板负责智能座舱和智能驾驶,左脑MCU主板负责整车控制和车身控制。
而超算平台可实现不同芯片切换,由一颗高通8295/8115 SoC芯片和一颗恩智浦S32G MCU芯片组成,缩减冗余ECU数量,配合千兆以太网和5G通讯,解决了多域融合之后的中央超算平台数据通信和算力问题。
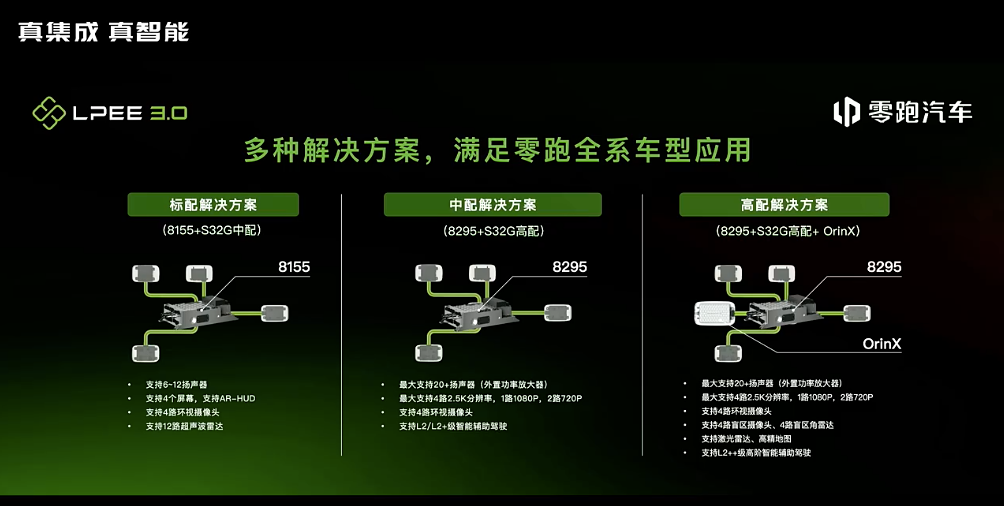
另外,针对有激光雷达的高配智能驾驶车型提供了英伟达Orin-X增强算力,因此,针对不同需求有标配、中配和高配三套方案:
标配方案
硬件高通8155+恩智浦S32G(3核)
支持6~12扬声器、4个屏幕、AR-HUD
支持4路环视摄像头、1路人脸摄像头、12路超声波雷达
中配方案
高通8295+恩智浦S32G(7核),具备30TOPS算力
最大支持20+扬声器(外置功率放大器)、4路2.5K分辨率,1路1080P,2路720P
支持4路环视摄像头,实现L2/L2+级智能辅助驾驶
高配方案
高通8295+恩智浦S32G(7核)+英伟达Orin-X,整车具备284TOPS算力
最大支持20+扬声器(外置功率放大器)、4路2.5K分辨率,1路1080P,2路720P
支持激光雷达、高精地图、4路环视摄像头、4路盲区摄像头、4路盲区角雷达,实现L2++级高阶智能辅助驾驶


软件层面
有硬件的支持,也要有软件的匹配,“四叶草”软件架构系统融合仪表系统、图像系统、声音系统、多媒体系统、中央网关、ADAS系统、ECU系统、CAN系统,可实现Android、QNX、Linux OS、RTOS x3四个系统运行。通过标准化接口设计,实现SOA服务架构。
目前域控式架构,代码库数量多且各自为政,很难统一协调,因此用户自己定义汽车的权限是不够的。零跑这套方案预留了500个以上的接口,可实现软件定义汽车。

这一步早有预谋,想追上至少几年时间
为什么零跑能在2023年就落地中央集成式电子电气架构,而且用一颗SOC+一颗MCU就能融合四大域。而底盘域融合也是早晚的事情。而别人需要等到2025年甚至更晚?
汽车企业能否快速实现多域融合,更轻松的高效的协调不同模块软硬件,核心问题在于对技术的掌控能力,也就是是否有全域自研能力。说起来简单,却需要大量成本投入。
零跑汽车在新势力里面算是比较低调的,从创立之初就选择了不太讨巧的三电自研方式,以至于很长一段时间,比同期新势力的节奏要慢。但这也是厚积薄发的基础。而零跑在品牌建立之初就实现了多项核心技术自研,目光长远、布局早。
虽然投入高,回报慢,一旦成功好处多多:
1、缩短研发周期、减少对供应商依赖,因此研发成本可控;
2、软硬件底层大通,一致性高,因此整车性能更强;
3、核心技术自主可控,抵抗风险能力更好。
根据零跑汽车官方的说法,他们是是目前国内造车新势力中唯一具备全域自研能力且垂直整合度最高的智能电动车企。同时已实现整车成本70%的自研自造能力;除电芯、内外饰外购,底盘、汽车电子电器为自研及外包生产外,其它所有零部件均为自研自产。
因此三大平台通用化率达到88%,涵盖A0-C级的轿车、SUV、皮卡、MPV等多种车型。




